
|
| ||||||||||||||||||||||||||||||||||||||||||||
â¤Ă§ĘĂéҧµŃÇËŘčąÂąµě (Robot Structure)¨ŇˇµÍą·ŐčáĹéÇĽÁä´éŕˇĂÔčąąÓŕˇŐčÂǡѺŕĂ×čͧ˘Í§ĂĐşşËŘčąÂąµěÍصĘŇˡĂĂÁăËéˇŃş·Řˇć ·čŇą·ĂŇşáĹéǹФĂŃşÇčŇʶҹˇŇĂłě㹻Ѩ¨ŘşŃąąŃ鹡ÓĹѧÁŐˇŇĂŕ»ĹŐčÂąá»Ĺ§ä»ÍÂčҧÁҡ ˇŇĂ»ĂŃşµŃǢͧŔҤÍصĘŇˡĂĂÁˇŇĂĽĹÔµŕͧˇçµéͧÁŐˇŇĂ»ĂŃşµŃÇŕľ×čÍăËéĘŇÁŇöá˘č§˘Ńąä´éăąµĹŇ´¸ŘáԨ ËŘčąÂąµěÍصĘŇˡĂĂÁ·ŐčąÓÁŇŞčÇÂ㹡ĂкǹˇŇĂĽĹÔµ¨Ö§ŕ»çąÍա˹Öč§ŕ·¤âąâĹÂŐŕ¤Ă×čͧ¨ŃˇˇĹÍѵâąÁѵԷŐčĘÓ¤ŃŕĹ·Őŕ´ŐÂÇ áĹĐ㹵͹·Őč 2 ¨Đŕ»çąˇŇĂáąĐąÓăËé·Řˇ·čŇąä´éĂŮé¨ŃˇˇŃşËŘčąÂąµě㹧ҹÍصĘŇˡĂĂÁÁҡÂÔ觢Öéą ŕľ×čÍŕµĂŐÂÁ¤ÇŇÁľĂéÍÁˇčÍą·Őč¨ĐĘŇÁŇöâ»ĂáˇĂÁˇŇ÷ӧҹ˘Í§ÁŃąä´é ąŃ蹡ç¤×Í â¤Ă§ĘĂéҧ˘Í§µŃÇËŘčąÂąµěáĹĐĹѡɳСŇĂŕ¤Ĺ×čÍą·Őč˘Í§ËŘčąÂąµěąŃčąŕͧ ·Ń駹Őé ¨Ňˇ·Őč·Řˇ·čŇą·ĂŇşˇŃąáĹéǹФĂŃşÇčŇͧ¤ě»ĂСͺ˘Í§ĂĐşşˇŇäǺ¤ŘÁËŘčąÂąµěľ×éą°ŇąąŃ鹨ĐÁŐÍÂŮč´éÇ¡ѹ 3 ĘčÇą »ĂСͺ´éÇÂ
ͧ¤ě»ĂСͺ·Ńé§ 3 ĘčÇą·ŐčˇĹčŇÇÁҢéҧµéąąŃéąŕĂŐ¡ä´éÇčŇŕ»çąĘÔ觷ŐčĘÓ¤ŃÁҡ ŕľĂŇĐŕą×čͧ¨ŇˇˇŇäǺ¤ŘÁˇŇ÷ӧҹ˘Í§ËŘčąÂąµěËĂ×͡ŇĂâ»ĂáˇĂÁËŘčąÂąµěăËéĘŇÁŇö·Ó§Ňąä´éąŃéą ¨ĐµéͧÁŐ¤ÇŇÁĂŮé㹢éÍÁŮĹ·ŐčŕˇŐčÂǡѺĂŇÂĹĐŕÍŐ´·ŐčĘӤѢͧµŃÇËŘčąÂąµě´éǨ֧¨ĐĘŇÁŇöâ»ĂáˇĂÁËŘčąÂąµěä´éÍÂčҧ¶Ůˇµéͧ ĘÓËĂŃşµÍąąŐé¨Đ˘ÍˇĹčŇǶ֧ĂŇÂĹĐŕÍŐ´ăąĘčÇą˘Í§Í§¤ě»ĂСͺµŃÇáá ¤×Í ‘µŃÇËŘčąÂąµě’ â¤Ă§ĘĂéҧµŃÇËŘčąÂąµěµŃÇËŘčąÂąµě (Robot Body / Manipulator) ŕ»çąĘčÇą·ŐčĘӤѷŐčĘŘ´ ŕľĂŇĐŕÇĹŇ·ŐčŕĂҨоԨŇĂłŇŕĹ×͡ăŞéËŘčąÂąµěĘѡµŃÇŕľ×čÍ·ÓÁŇăŞéŞčÇÂ㹡ĂкǹˇŇĂĽĹÔµ¨Đµéͧ¤ÓąÖ§¶Ö§ĹѡɳТͧ§Ňą ľ×éą·Őč ĘÔč§áÇ´ĹéÍÁ ŕą×čͧ¨ŇˇµŃÇËŘčąÂąµěąŃéąŕ»çąĘčÇą·ŐčµéͧąÓÁŇăŞé㹡ĂкǹˇŇ÷ӧҹÍÂŮčµĹÍ´ŕÇĹŇ «Öč§ĹѡɳЧҹ·ŐčᵡµčҧˇŃąˇç¨Đŕ»çąµŃǺ觺͡ăąŕĂ×čͧ˘Í§˘ąŇ´â¤Ă§ĘĂéҧ˘Í§µŃÇËŘčąÂąµě´éÇ «Ö觵çąŐéËĹŇÂć ·čŇąÍҨąÖˇŔŇľÍ͡ «Ö觶éŇŕ»ĂŐÂşŕ·ŐÂşˇŃş¤ą Ëҡ¤ą·ŐčµŃÇŕĹçˇÍҨ¡˘Í§ä´éąéÍ¡ÇčҤąµŃÇăËčąŃčąŕͧ ´Ń§ąŃéą ŕĂҨ֧µéͧÁŇČÖˇÉŇăËéŕ˘éŇă¨ŕˇŐčÂǡѺâ¤Ă§ĘĂéҧ˘Í§µŃÇËŘčąÂąµěˇčÍąÇčŇ»ĂСͺ仴éÇÂÍĐäĂşéҧ ŕľĂŇĐËҡŕĂŇäÁč·ĂŇşŕĂҡç¨ĐäÁčĘŇÁŇöâ»ĂáˇĂÁËŘčąÂąµěăËé·Ó§Ňąä´é ·ŐčĘÓ¤Ń ¤×Í ŕĂҨФŘ¡Ѻ¤ąÍ×čąäÁčĂŮéŕĂ×čͧÍŐˇ´éÇÂ
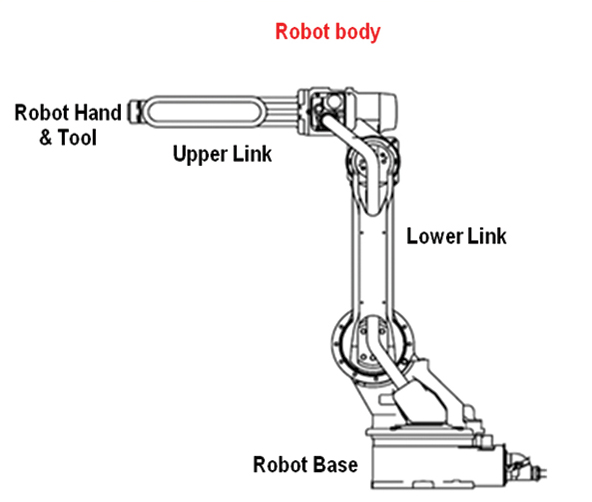
¨ŇˇŔŇľ´éŇąşąŕ»çąŔŇľáĘ´§ăËéŕË繶֧µŃÇÍÂčҧ˘Í§µŃÇËŘčąÂąµě (Robot Body) ÂŐčËé͵čҧć ăąµĹŇ´ËŘčąÂąµě ¨ĐŕËçąä´éÇčҶ֧áÁé¨ĐµčҧÂŐčËé͡ѹ áµčĹѡɳТͧâ¤Ă§ĘĂéҧ¨ĐÁŐĹѡɳĐâ¤Ă§ĘĂéҧ·ŐčŕËÁ×ÍąˇŃą ¤ÇŇÁᵡµčҧ¨ĐÍÂŮč·ŐčĹѡɳТͧˇŇĂ Design ŕ·čŇąŃéą â´Ââ¤Ă§ĘĂéҧ·ŐčĘӤѶ١Í͡ẺÁҨлĂСͺ´éÇÂĘčÇą˘Í§·č͹ᢹËĂ×Í ‘Link’ áĹĐĘčÇą˘Í§˘é͵čÍËĂ×Í ‘Joint’ áĹĐĹѡɳĐâ¤Ă§ĘĂéҧ˘Í§ËŘčąÂąµě·Ńé§ 2 ĘčÇąąŃéą Âѧŕ»çąµŃǡÓËą´ŞąÔ´˘Í§ËŘčąÂąµěµŇÁ·ŐčˇĹčŇÇäÇé㹵͹·Őč 1 ÍŐˇ´éÇ Link & JointLink & Joint ŕ»çąâ¤Ă§ĘĂéҧËĹѡ˘Í§µŃÇËŘčąÂąµě «Ö觷Ńé§ĘͧĘčÇąąŐé¨Đŕ»çąĘčÇą·ŐčŕĂҵéͧ·ÓˇŇĂâ»ĂáˇĂÁăËéËŘčąÂąµěŕˇÔ´ˇŇĂŕ¤Ĺ×čÍą·ŐčáĹШзӧҹĘŃÁľŃą¸ěˇŃąµŇÁâ»ĂáˇĂÁ·Őč User ˇÓËą´äÇé Link ¤×Í â¤Ă§ĘĂéҧ˘Í§ËŘčąÂąµě·Őčŕ»çą·č͹ᢹ ÁŐËąéŇ·Őč㹡ŇĂŕ˘éŇĘŮčľ×éą·ŐčˇŇ÷ӧҹ â´Â¤ÇŇÁÂŇǢͧ Link ¨Đŕ»çąµŃǺ觺͡ĘÁĂöąĐ˘Í§µŃÇËŘčąÂąµě áĹФÇŇÁĘŇÁŇö㹡ŇĂŕ˘éŇĘŮčľ×éą·ŐčˇŇ÷ӧҹ´éÇ ËŘčąÂąµěÍصĘŇˡĂĂÁŞąÔ´ Articulate Robot ¨ĐÁŐ Link ÍÂŮč¨ÓąÇą 2 Link ´Ń§ąŐé a. Link ·čÍąşą ËĂ×Í Upper Link ŕ»çąĘčÇą˘Í§·č͹ᢹşąĘÓËĂŃşŕ˘éŇĘŮčľ×éą·ŐčˇŇ÷ӧҹ áĹĐŕ»çąĘčÇą·ŐčŕŞ×čÍÁµč͡Ѻ˘éÍÁ×Í Robot Hand ĘÓËĂŃşµÔ´µŃé§ Robot Tool b. Link ·čÍąĹčҧ ËĂ×Í Lower Link ŕ»çąĘčÇą˘Í§·č͹ᢹ·Őč·ÓËąéŇ·Őč㹡ŇĂĂŃşąéÓ˹ѡ·Ńé§ËÁ´·ŐčŕˇÔ´˘Ö鹢ͧµŃÇËŘčą·Ńé§ËÁ´ŕ»çąĘčÇą·ŐčĂͧĂŃşąéÓ˹ѡ˘Í§á˘ą·čÍąşąáĹĐŕŞ×čÍÁµčÍÍÂŮčˇŃş°Ňą Base ˘Í§ËŘčąÂąµě
µŇÁ·Őč·ĂŇşˇŃąăąŕş×čͧµéąáĹéÇÇčŇËŘčąÂąµěÍصĘŇˡĂĂÁŞąÔ´ Articulate Robot ąŃéą ¶ŮˇÍ͡ẺÁŇăËéÁŐĹѡɳФĹéŇ¡Ѻᢹ˘Í§ÁąŘÉÂě ´Ń§ąŃéąŕľ×čÍăËé§čҵč͡ŇĂ·Ó¤ÇŇÁŕ˘éŇă¨ŕˇŐčÂǡѺŕĂ×čͧ˘Í§ Link ·Ńé§ 2 ĘčÇą ¨Ö§˘Íŕ»ĂŐÂşŕ·ŐÂşˇŃşá˘ą˘Í§ÁąŘÉÂěµŇÁµŇĂҧ·Őč 1 µŇĂҧ·Őč 1 : µŇĂҧŕ»ĂŐÂşŕ·ŐÂşĂĐËÇčҧâ¤Ă§ĘĂéҧ Link ˘Í§ËŘčąÂąµěáĹРᢹ˘Í§ÁąŘÉÂě
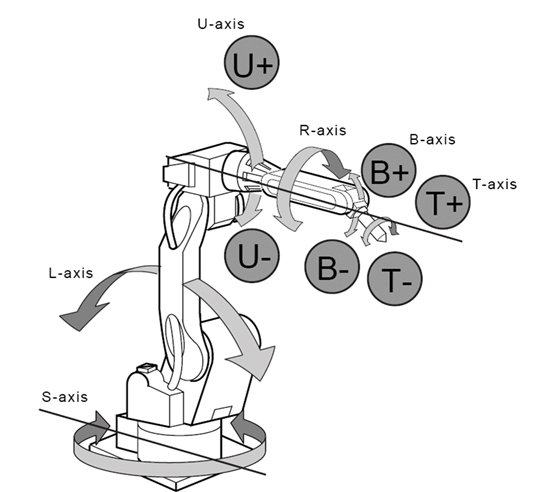
Joint ¤×Í â¤Ă§ĘĂéҧ˘Í§ËŘčąÂąµěĘčÇą·Őčŕ»çą˘é͵čÍ·Őč·ÓËąéŇ·Őč㹡ŇĂŕŞ×čÍÁµčÍĂĐËÇčҧ Link ˘Í§µŃÇËŘčąÂąµěáĹĐÂѧ·ÓËąéŇ·Őč㹡ŇĂŕ¤Ĺ×čÍą·Őč˘Í§µŃÇËŘčąÂąµěăËéĘŇÁŇöŕ¤Ĺ×čÍą·Őčä»ÂѧµÓá˹觵čŇ§ć ·ŐčŕĂҵéͧˇŇĂ ˇĹčŇǤ×Í ˇŇĂ·ŐčŕĂŇ·ÓˇŇĂâ»ĂáˇĂÁËŘčąÂąµěăËéŕ¤Ĺ×čÍą·Őč ˇç¤×Í ˇŇĂâ»ĂáˇĂÁˇŇ÷ӧҹ˘Í§ Joint ËĂ×͢é͵čÍ·Ńé§ËÁ´˘Í§ËŘčąÂąµě ąŃčąËÁҤÇŇÁÇčŇ ĘčÇą˘Í§ Joint ¤×Í ĘčÇą·Őč·ÓˇŇõԴµŃé§ Servo Motor äÇéąŃčąŕͧ â´Â»ˇµÔáĹéÇ ËŘčąÂąµěÍصĘŇˡĂĂÁŞąÔ´ Articulate Robot ¨ĐÁŐ˘é͵čÍ ËĂ×Í Joint ·Ńé§ËÁ´ 6 Joint ËĂ×ͺҧ¤ĂŃ駤ą·ŐčÍÂŮčăąÇ§ˇŇáŇäǺ¤ŘÁËŘčąÂąµě ÁѡŕĂŐ¡ÇčŇËŘčąÂąµě 6 ᡹ (6 Axis) ´Ń§áĘ´§ăąĂŮ»·Őč 3
¨ŇˇĂŮ»·Őč 3 áĘ´§ăËéŕË繶֧˘é͵čÍËĂ×Í Joint ˘Í§ËŘčąÂąµě«Öč§ÁŐÍÂŮč´éÇ¡ѹ·Ńé§ËÁ´ 6 Joint ´éÇ¡ѹ â´ÂÁŐŞ×čÍŕĂŐ¡áĹĐËąéŇ·Őč˘Í§áµčĹĐ Joint áĹĐŕ»ĂŐÂşŕ·ŐÂşˇŃşá˘ą˘Í§ÁąŘÉÂěä´éµŇÁµŇĂҧ·Őč 2 µŇĂҧ·Őč 2 : Ş×čÍŕĂŐ¡áĹĐËąéŇ·Őč˘Í§áµčĹĐ Joint áĹĐŕ»ĂŐÂşŕ·ŐÂşˇŃşá˘ą˘Í§ÁąŘÉÂě
| ||||||||||||||||||||||||||||||||||||||||||||
ĽŮéµŃ駡ĂĐ·Ůé Proshop Man | ||||||||||||||||||||||||||||||||||||||||||||

|
1 |
¤ÇŇÁ¤Ô´ŕËçą·Őč 1 (4476088) | |
şÍ·ĂҧҹĽĹËÇÂĘŇÁŇöăŞé§Ňąä´éżĂŐ ŕľÔčÁşÍ·ĂҧҹĽĹËÇ ËĂ×ͤéąËŇ @465wlyxz ĂҧҹĽĹËÇ ăŞé§ŇążĂŐäÁčÁŐâ¦ÉłŇ   | |
ĽŮéáĘ´§¤ÇŇÁ¤Ô´ŕËçą şÍ·»ĂСŇČĽĹËÇÂÎčͧˇ§ VISA (pnckdevapps-at-gmail-dot-com)ÇŃą·ŐčµÍş 2024-04-09 07:22:18 | |
1 |
